About Me
A computer vision expert with industry experience and a Ph.D. specializing in object detection with context and more. I graduated from the Computer Science Department at Ben Gurion University (BGU), as a member of the Interdisciplinary Computational Vision Laboratory (iCVL) led by Prof. Ohad Ben-Shahar.
My main research interests include the detection of objects in 2D/3D with and without context, pose estimation, point clouds, and so on.
Publications
Please check out the research tab.Contact Information
Contact me at ehud dot barnea at gmail.
Teaching (TA)
- 2014 - 2017:
- Spring 2014:
- Fall 2014:
- Spring 2013:
- Fall 2013:
- Spring 2012:
- Spring 2011:
Research
Understanding the utility of context for object detection
Barnea E. and Ben-Shahar O., Exploring the Bounds of the Utility of Context for Object Detection, CVPR 2019 (paper).
Global shape statistics for curve completion
Barnea E. and Ben-Shahar O., Curve Reconstruction via the Global Statistics of Natural Curves, CVPR 2018 (paper).

Contextual object detection
Barnea E. and Ben-Shahar O., Contextual Object Detection with a Few Relevant Neighbors, ACCV 2018 (paper).

3D object detection exploiting symmetry
Barnea E. and Ben-Shahar O., Depth Based Object Detection from Partial Pose Estimation of Symmetric Objects, ECCV 2014 (paper).
A fully automatic fruit harvesting robot (cRops)
Barnea E., Mairon R., and Ben-Shahar O., Colour-agnostic shape-based 3D fruit detection for crop harvesting robots, Biosystems Engineering 2016 (Q1 journal) (paper).
Kapach K., Barnea E. *, Mairon R. *, Yael E., and Ben-Shahar O., Computer vision for fruit harvesting robots – state of the art and challenges ahead, IJCVR 2012 (paper).

Personal
Anki Furigana Hint
For those learning Japanese using Anki SRS, should you wish to configure a hint field to add furigana to the currently visible kanji, check out this page.
Group Seminar
Our group holds weekly seminars on the subject of computational vision and cognition. Most of our speakers consist of graduate students and professors presenting their latest research, and sometimes general subjects are displayed as well. If you have interesting work to show, or you wish to be added to the newsletter, please contact me.
Upcoming Lectures:
baaaaConfiguring An Anki Hint To Display Furigana
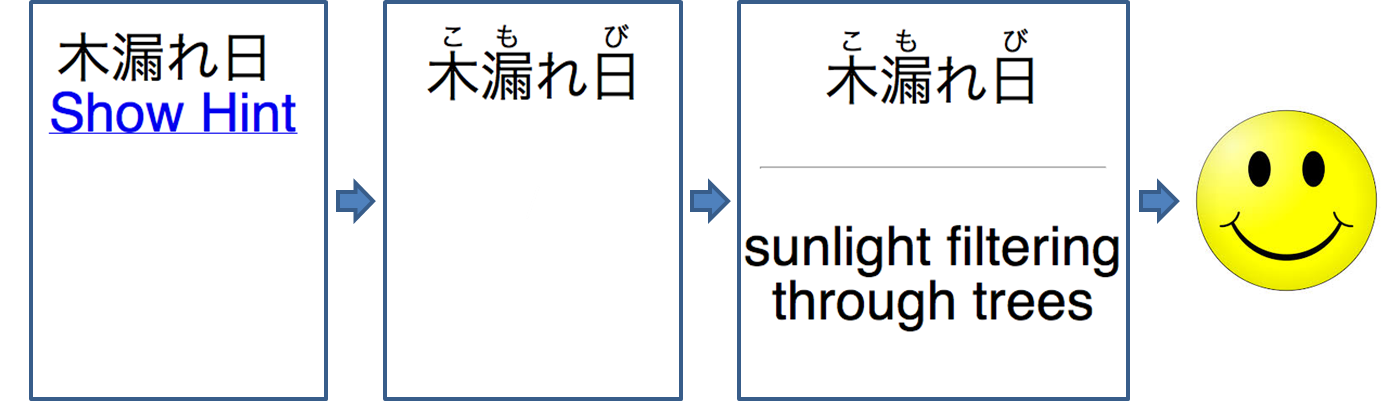
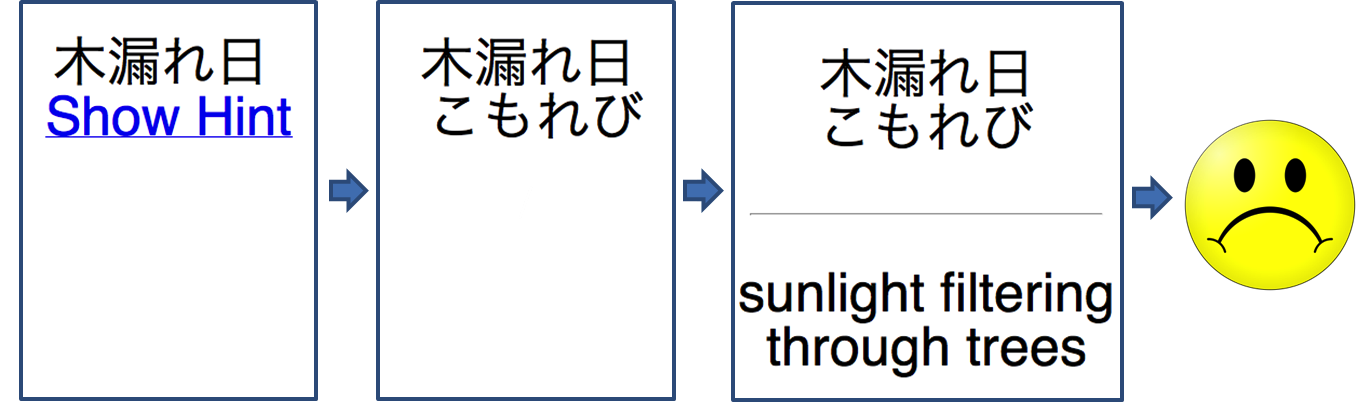
An Anki hint is like a link that adds information to a card after it is clicked. This feature is pretty comfortable, though it does not allow you to make changes to the data that is already displayed (also, it doesn't allow to do something like {{hint::furigana::Japanese}} which forces us to include a hiragana field. See sad-face example below). However, as a Japanese learner I did want to change the data. When I read read text with kanji and furigana on top I always seem to disregard the kanji and read the furigana first. To solve this I went on and displayed only the kanji and added a hint to display the hiragana reading, however, this isn't elegant, so what I would like to have displayed is the furigana above the kanji. This appears to be possible using links (see smiley-face example at the bottom of the page).
Since Anki allows links to be added to cards we can create a link to resemble a hint. It seams text cannot be altered, so we configure this link to have two actions upon click, to hide the visible text (kanji only) and then to display the hidden text (kanji with furigana). To do so with a deck containing two fields named "English" and "Japanese" (where "Japanese" contains text like "木[こ] 漏[も]れ 日[び]"), you may simply copy the front and back templates below:
Front template:
<span id="before" style="font-family: Mincho; font-size: 50px; ">
{{kanji::Japanese}}
<br>
<a href="#"
onclick="document.getElementById('after').style.display='block';document.getElementById('before').style.display='none';return false;">
Kana</a>
</span>
<span id="after" style="font-family: Mincho; font-size: 50px; display: none">
{{furigana::Japanese}}
</span>
Back template:
<span style="font-family: Mincho; font-size: 50px; ">
{{furigana::Japanese}}
<hr id=answer>
{{English}}
</span>
As you can see, the front template is made of two "span" tags, a span tag (with id="before"), including the link (or hint), and another span tag (with id="after"). The "after" tag has a property "display: none", which means it starts off as hidden (while the "before" one does not have this property and is visible). The action of the link (specified in the onclick field) does two things, it sets the display value of the "after" tag to "block" (rendering it visible) and it sets the value of the "before" tag to "none" (rendering it hidden). The link disappears as well (as it is inside the "after" tag) and we are left only with the kanji and furigana on top. The back template had to be updated as well, so that it won't show the link and all the mess in the front template.
If you know of a better way to do so, please let me know.